Research
Current Projects
This are some of the projects in which I am currently working. If you are interested in any, please drop me a line at my email: gildardo.sanchez at tec.mx.
=====================================================================
Nanomaterials Property Modeling and Optimal Experimental Design
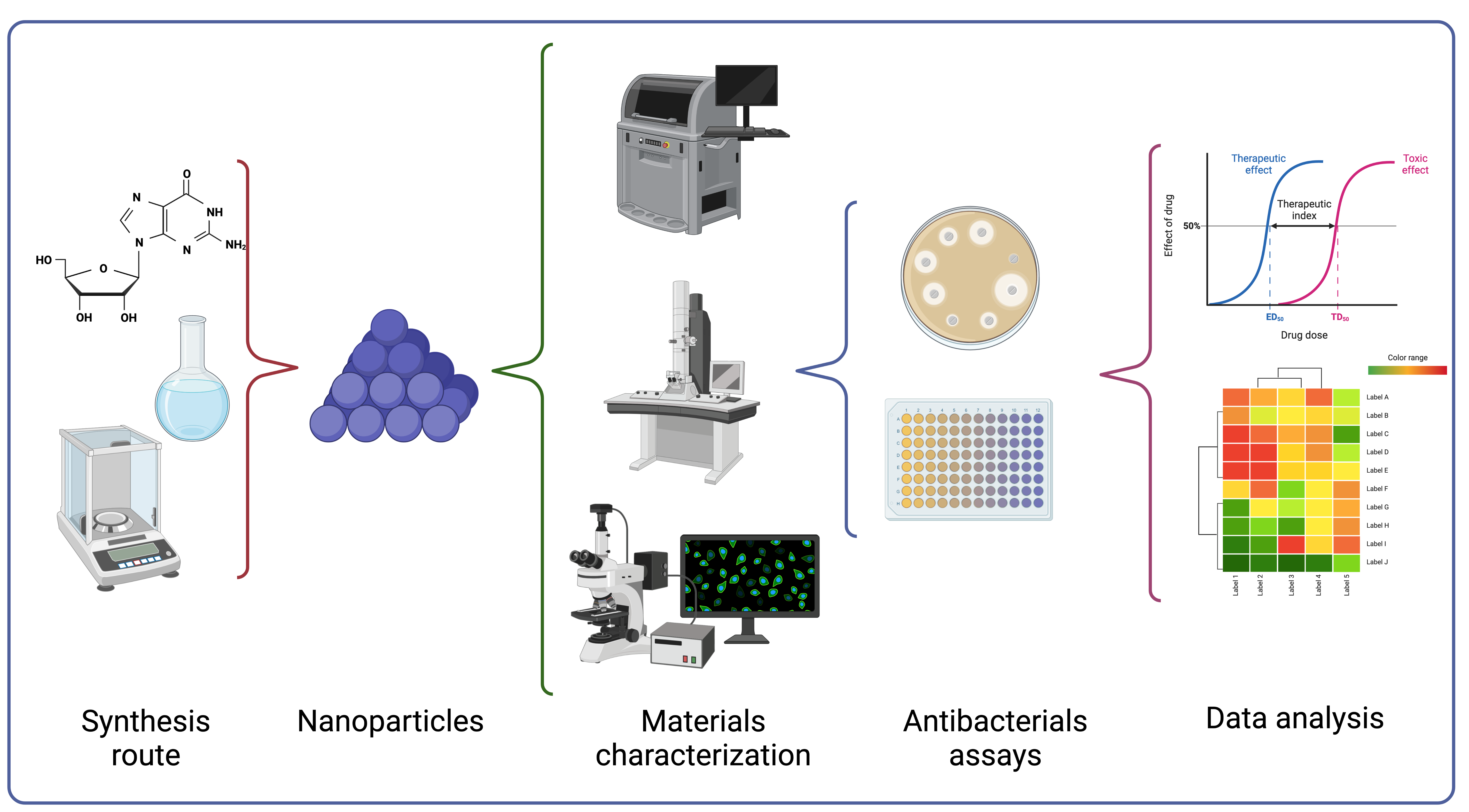
The process to generate a new material is long and costly. By using machine learning it is possible to achieve what is called Optimal Experimental Design (OED). This approach first generates a model using available data, then the model is used along with some optimization technique in order to find the most promising experiments, which will then be performed at the lab.
In this project, we have been collaborating with the Nanobiotechnology group of Tec de Monterrey, Campus Guadalajara in the modeling of nanomaterials that are studied as possible antibiotics.
=====================================================================
Robot Motion Planning and Machine Learning
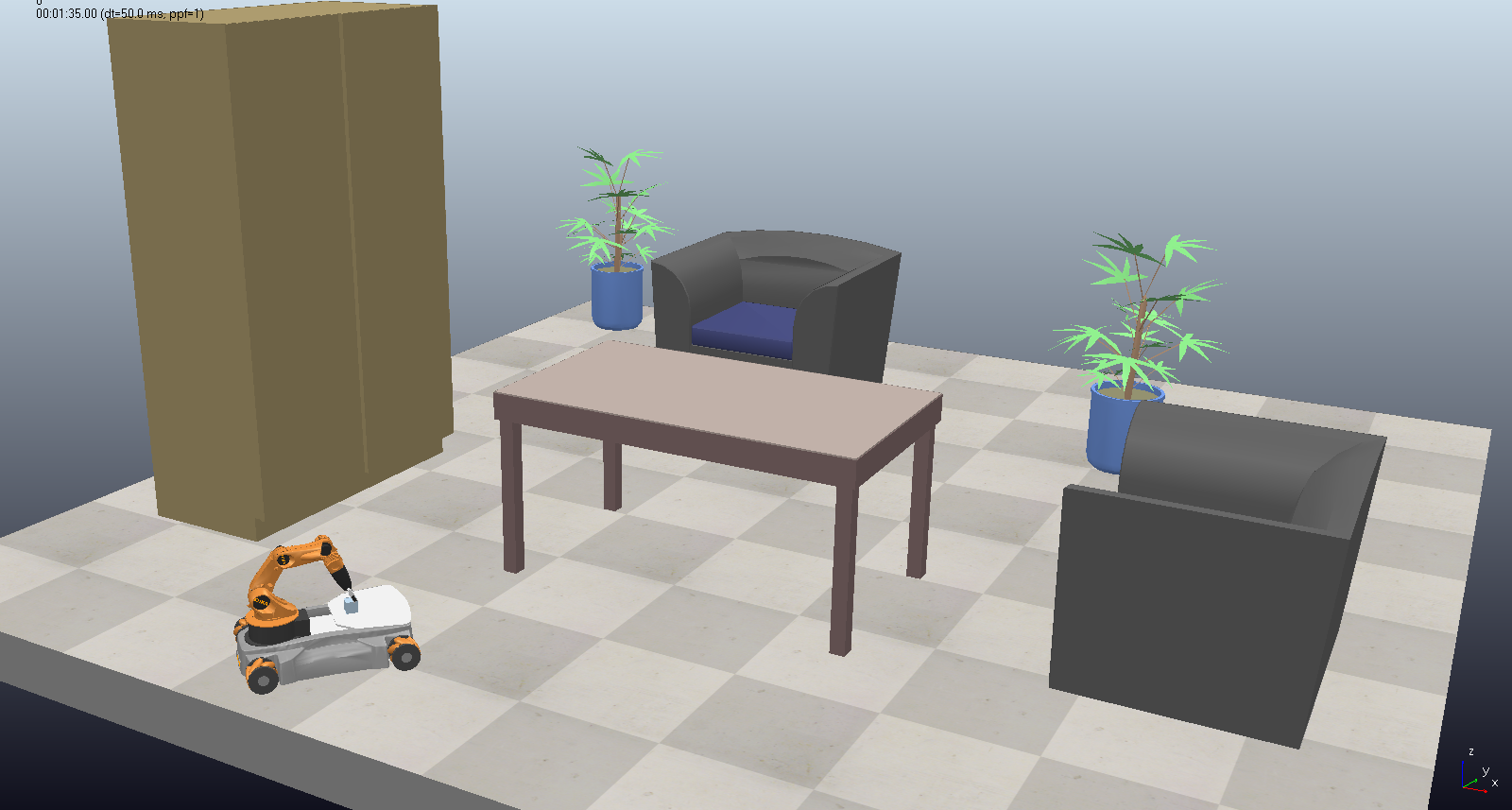
Motion planning is a fundamental and essential task for the deployment of robots in practical applications, and Machine Learning has been explored to improve the efficiency of motion planning. This happens mainly by two possibilities:
Human-crafted reward functions.
Learn feasible solutions from previously successful planning experiences.
In this project the main idea is to combine machine learning techniques to leverage the motion planning capabilities of robots. We have been using Deep Reinforcement Learning strategies, among other options.
This project is performed in collaboration with Prof. Rafael Murrieta, from Centro de Investigación en Matemáticas and Dr. Carlos Nieto, from U.S. Command Army Research Laboratory (ARL).
=====================================================================
Water properties modeling with Machine Learning
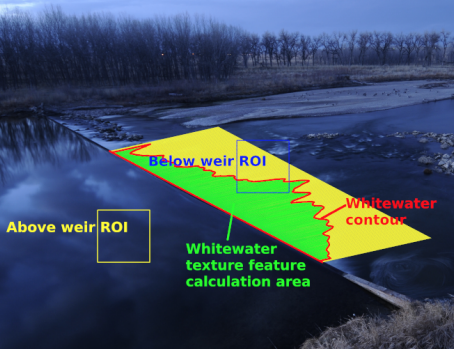
Water level and streamflow are required to answer many important hydrological questions such as water distribution, flood and erosion management, etc. Cameras are cheap and provide a wealth of information not available with commonly used sensors. In this project, the intention is to develop machine learning models in order to to fill gaps in sensor data for when sensors fail or funding is not available to operate the sensors.
This project is developed in collaboration with the University of Nebraska-Lincoln.
Past Projects
Sampling-based Robot Motion Planning